無錫市黄瓜黄色视频換熱設備有限公司位於風景秀麗的江南名城—無錫太湖佳絕處濱湖區,是專業生產製造換熱設備的廠家。
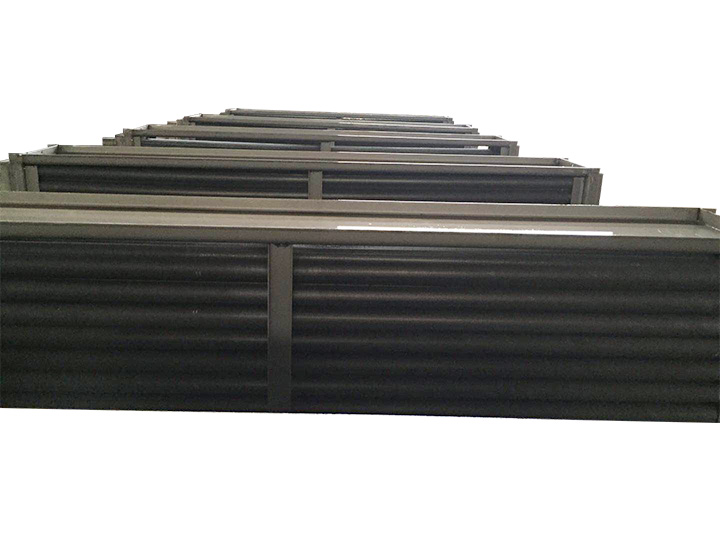
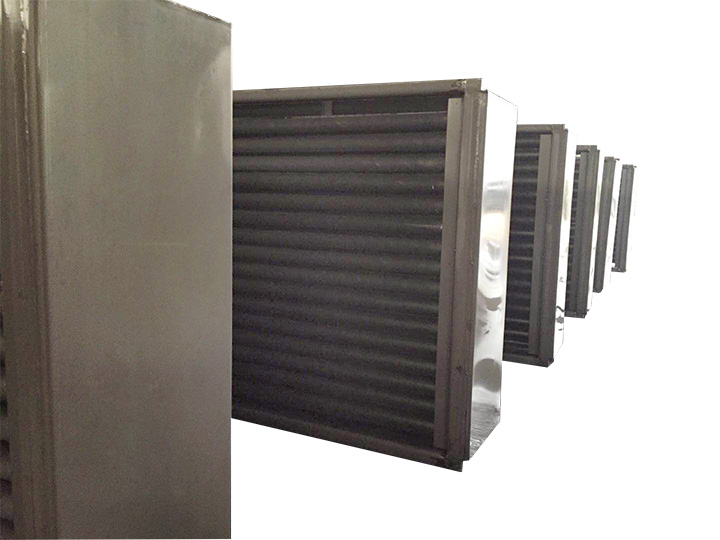
本公司充分與大專院校科研機構協同研發創新形成了以換熱設備為主體的多種係列產品。主要產品有螺旋板式換熱器(Ⅰ、Ⅱ 、Ⅲ型), 黄瓜视频APP下载(散熱器),黄瓜黄片软件,黄瓜视频三级片,空調換熱器(表冷器),管殼式換熱器(列管)及各類非標設備等,為化工、紡織印染、塗裝烘漆及城市供暖浴室、溫水遊泳館等配套提供換熱設備,取得了良好的社會效益和經濟效益,贏得了廣大用戶的認同。
隨著改革深入,領導運籌帷幄,全廠員工同心協力,產品不斷推陳出新,製造水平精益求精,公司本著優良、薄利、重義守信的企業宗旨與新老用戶真誠合作,在新世紀裏共創輝煌明天。
竭誠歡迎新老用戶來電來函聯係。
[更多...]
在設計和運行黄瓜视频APP下载時,壓力損失是一個關鍵參數,它直接關係到係統的整體能效和性能。壓力損失指的是流體通過設備時由於摩擦、流速變化和流向改變等因素導致的流體動能...
 淺談黄瓜视频三级片的換熱量 2024-03-30
概述黄瓜黄片软件的控製方式及其重要性 2024-02-29
如何提高黄瓜视频APP下载的傳熱效率? 2024-01-16
如何保持黄瓜视频三级片的良好性能 2023-12-29
黄瓜黄片软件進出口溫差過大對效率的影響 2023-12-18
淺談黄瓜视频三级片的換熱量 2024-03-30
概述黄瓜黄片软件的控製方式及其重要性 2024-02-29
如何提高黄瓜视频APP下载的傳熱效率? 2024-01-16
如何保持黄瓜视频三级片的良好性能 2023-12-29
黄瓜黄片软件進出口溫差過大對效率的影響 2023-12-18
黄瓜视频三级片是一種用於調節空氣溫度的設備,廣為應用於各種工業和建築環境。迎風麵積是此設備的一個重要參數,它直接影響到風機的功率和整體係統的能耗。迎風麵積,顧名思...
簡述黄瓜黄片软件電壓選擇與考慮因素 2024-04-16
淺談黄瓜视频APP下载管子長度與數量對性能的影響 2024-03-16
黄瓜视频三级片的熱交換效率:關鍵性能指標 2024-01-31
如何合適控製黄瓜黄片软件的濕度 2023-12-29
導致黄瓜视频APP下载熱量傳遞效率降低的原因 2023-12-18
Copy right © 2017 無錫市黄瓜黄色视频換熱設備有限公司 All Rights Reserved 蘇ICP備17013416號-1